Principles and vocabulary overview
Ultimate feature of interest
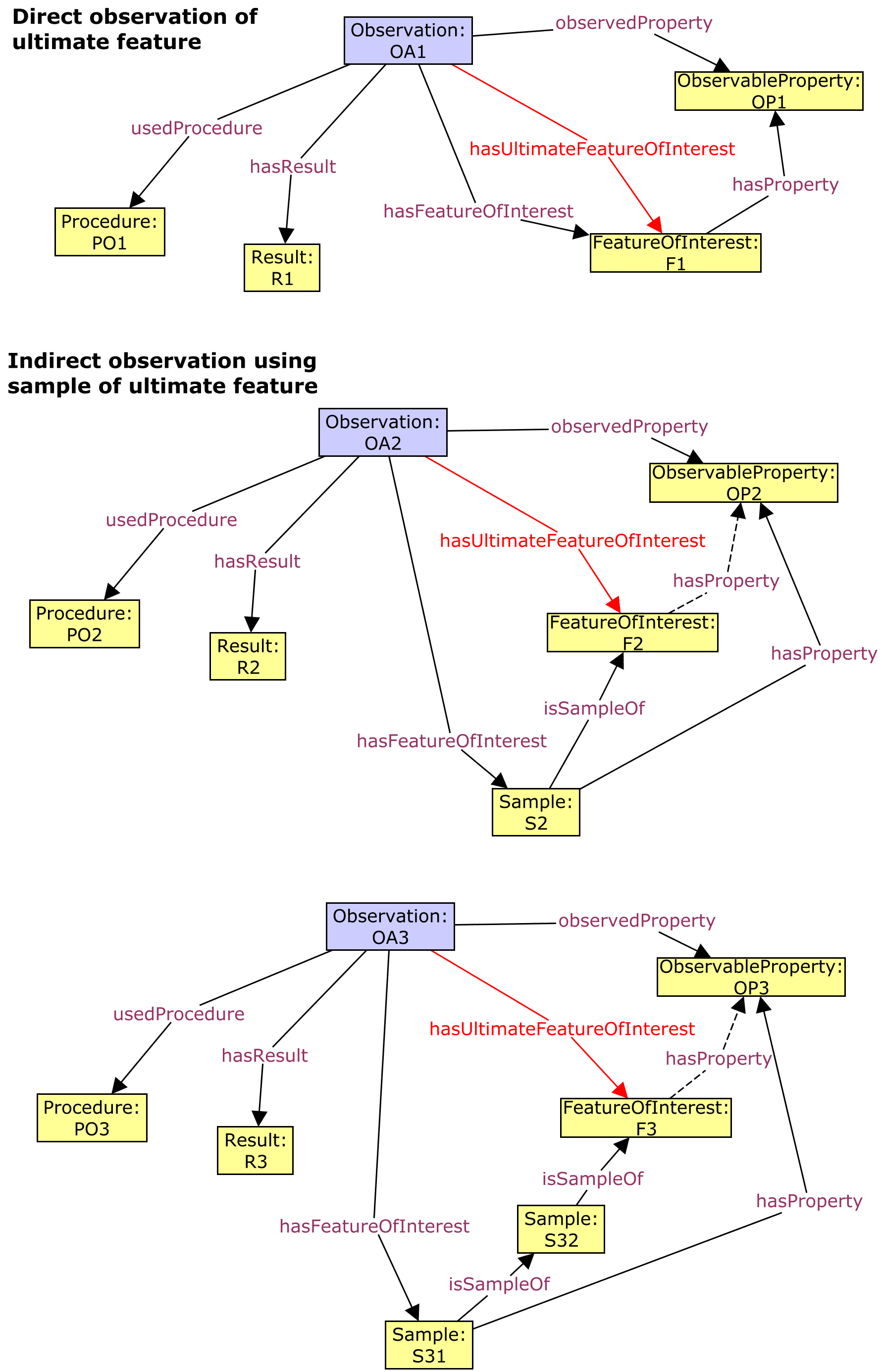
The object of the original hasFeatureOfInterest property of an act of observation, sampling, or actuation is the immediate or proximate FeatureOfInterest.
In some cases this is not the the ultimate thing that the act of observation, sampling, or actuation is concerned with, but is an intermediate thing, often a sample of the ultimate feature of interest, or perhaps a sample of a sample, etc.
There will often be a specifiable relationship between the proximate and ultimate feature of interest, such as a sampling-chain.
If this relationship is recorded, then an ultimate feature of interest might be inferred.
Nevertheless, particularly for discovery purposes, it is usually the ultimate feature of interest that really matters to the data user.
This requirement is satisfied by an object property called hasUltimateFeatureOfInterest.
Some patterns for the relationship of the ultimate feature of interest to observations () and acts of sampling (), and within sampling-chains, are illustrated below.
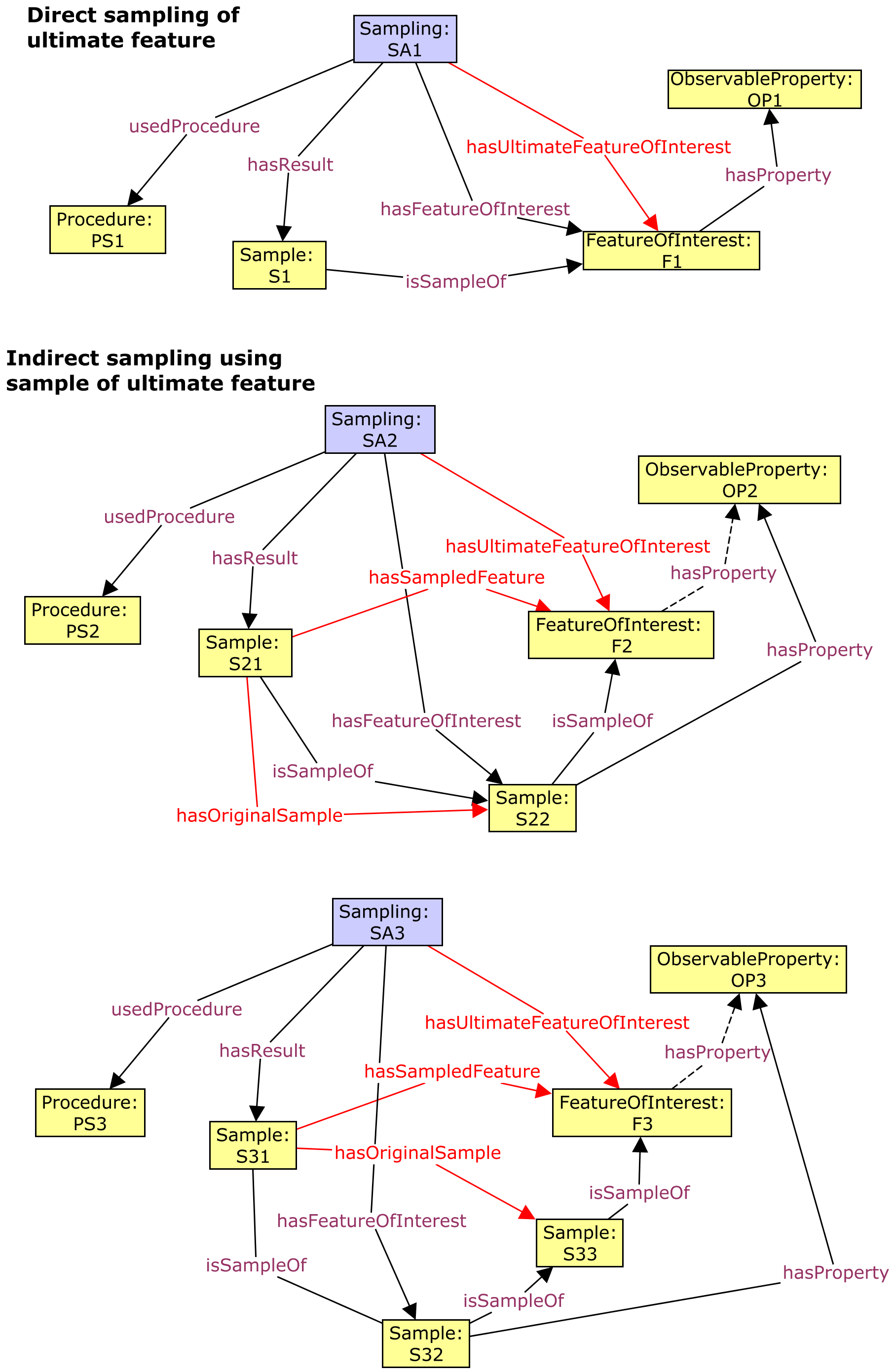
This requirement was described in OM-Lite [[?OM-Lite]], but was addressed there using a different pattern in which the property oml:featureOfInterest always links to the ultimate feature-of-interest, and an additional property oml:samplingStrategy links to the sample or some other description of the sampling arrangements.
However, that approach allowed multiple possible interpretations of ‘featureOfInterest’, and only representated chains of sampling or observation events indirectly.
The solution described here is explicit, and also applies to acts of sampling and actuation.
Basis of a chain of samples
Many observation workflows rely on a chain of samples, each making a sub-sample of the predecessor sample.
Knowing either the original sample or the initial feature of interest at the base of the chain is often useful for both discovery and management purposes.
For example, shows a scenario from geology involving many samples derived from an initial one, with some relationships that may be useful in processing and discovery of subsequent observations, the intention of which will be to characterize various aspects of the original sample which is representative of an ultimate feature of interest.
This is supported by two further object properties for relationships between samples and features of interest, called hasOriginalSample and hasSampledFeature.
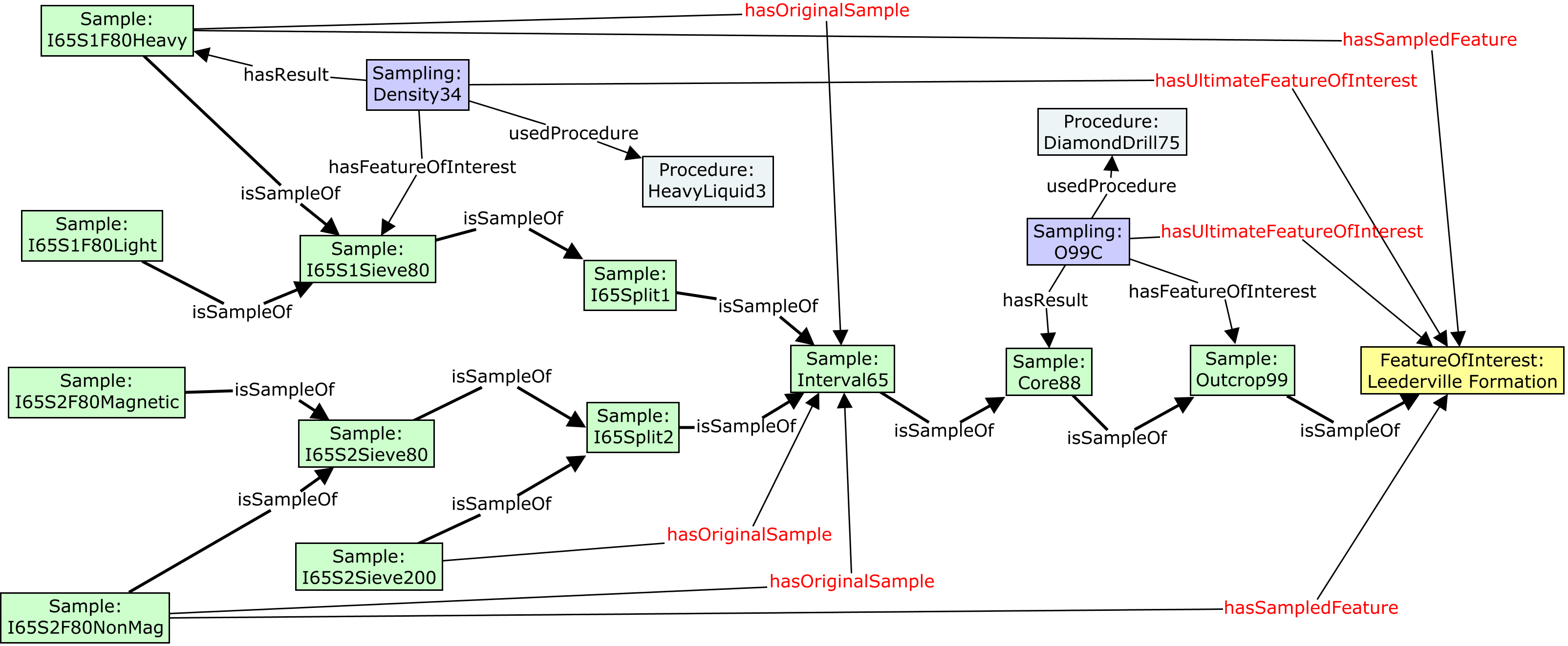
Having a direct indication of an original sample allows multiple results to be combined to describe the sample. Having a direct indication of the ultimate feature being sampled allows discovery of many samples that are intended to be representative of that feature.
Note that the scenario in is simplified from real-life scenarios, and also that the diagram only shows a subset of the full set of resources and relationships.
Homogeneous collection of observations
A collection of observations may share a common value for one or more of the characteristic observation properties. For example:
- many monitoring processes generate a stream of data in which only the (phenomenon-) time changes between consecutive results for the same property on a single feature of interest, observed using the same procedure implemented using the same sensor.
- a sensor network typically generates a set of results, over the same time interval, for the same property(s), over a suite of features-of-interest. Imaging sensors could be considered a special case of this, where the proximate features-of-interest correspond with individual pixels in the result.
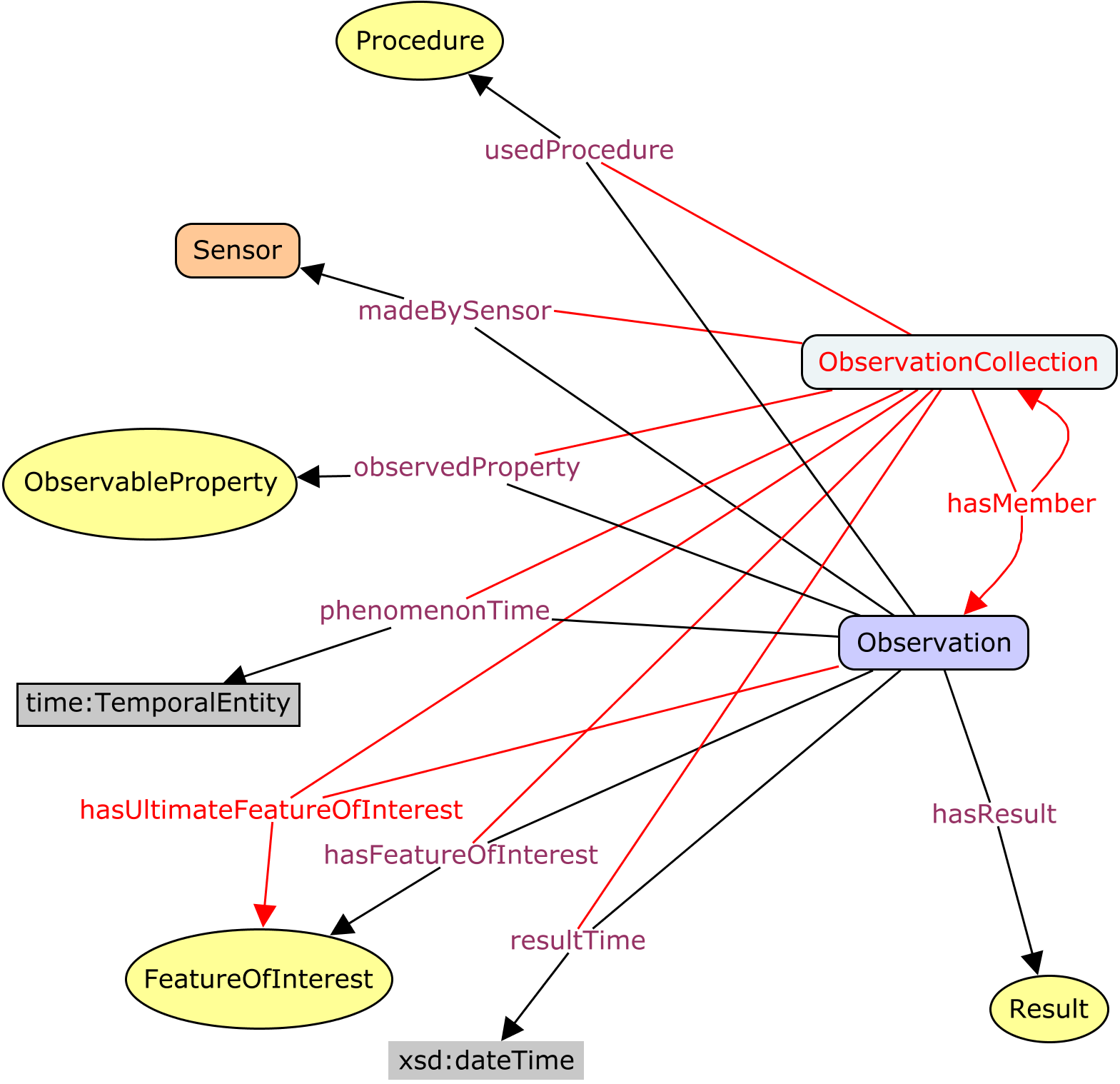
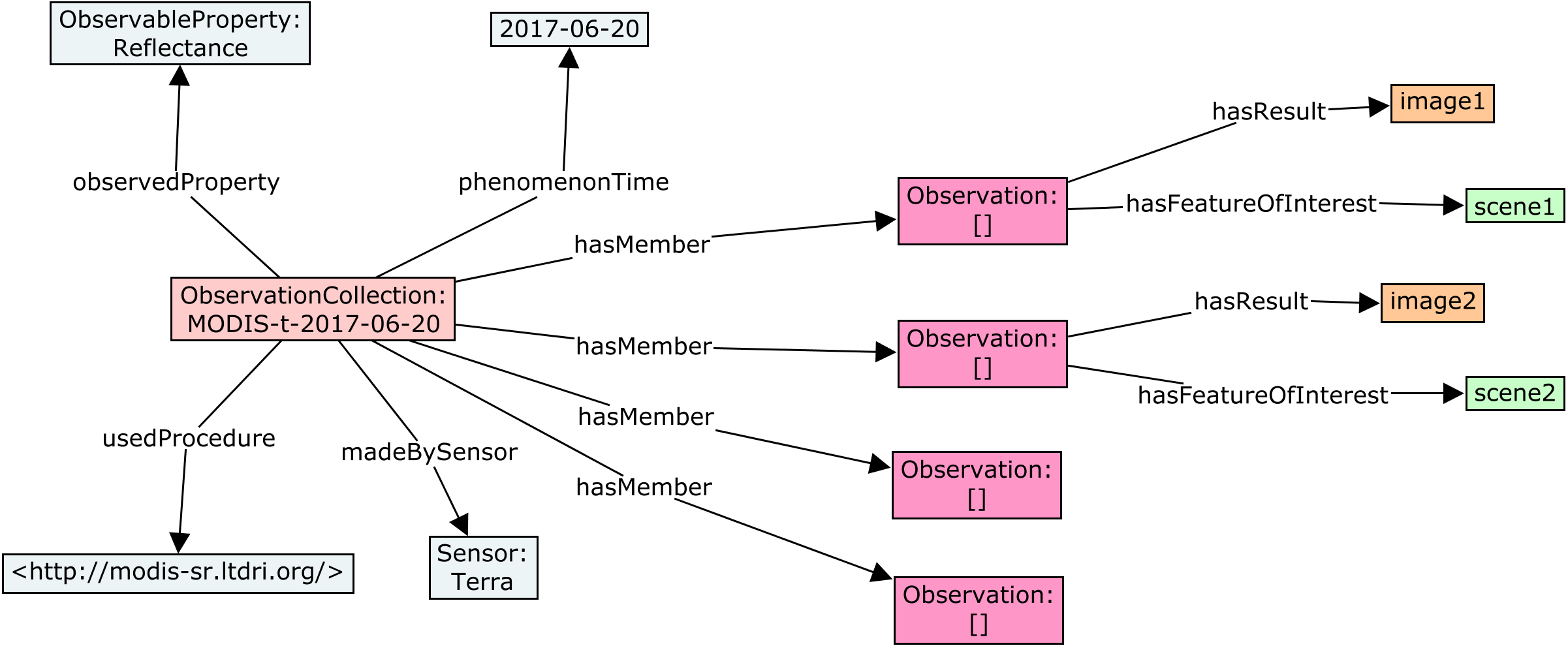
These patterns can be accommodated with the class ObservationCollection individuals of which may hold one or more of the essential properties of an atomic observation, except for the result.
Where present, the value of the property(s) of the collection are shared by all member observations.
Of the essential properties of an observation, only the value of each actual hasResult is not potentially shared by all member observations, though at least one of the other properties would be expected to vary between members in a typical collection.
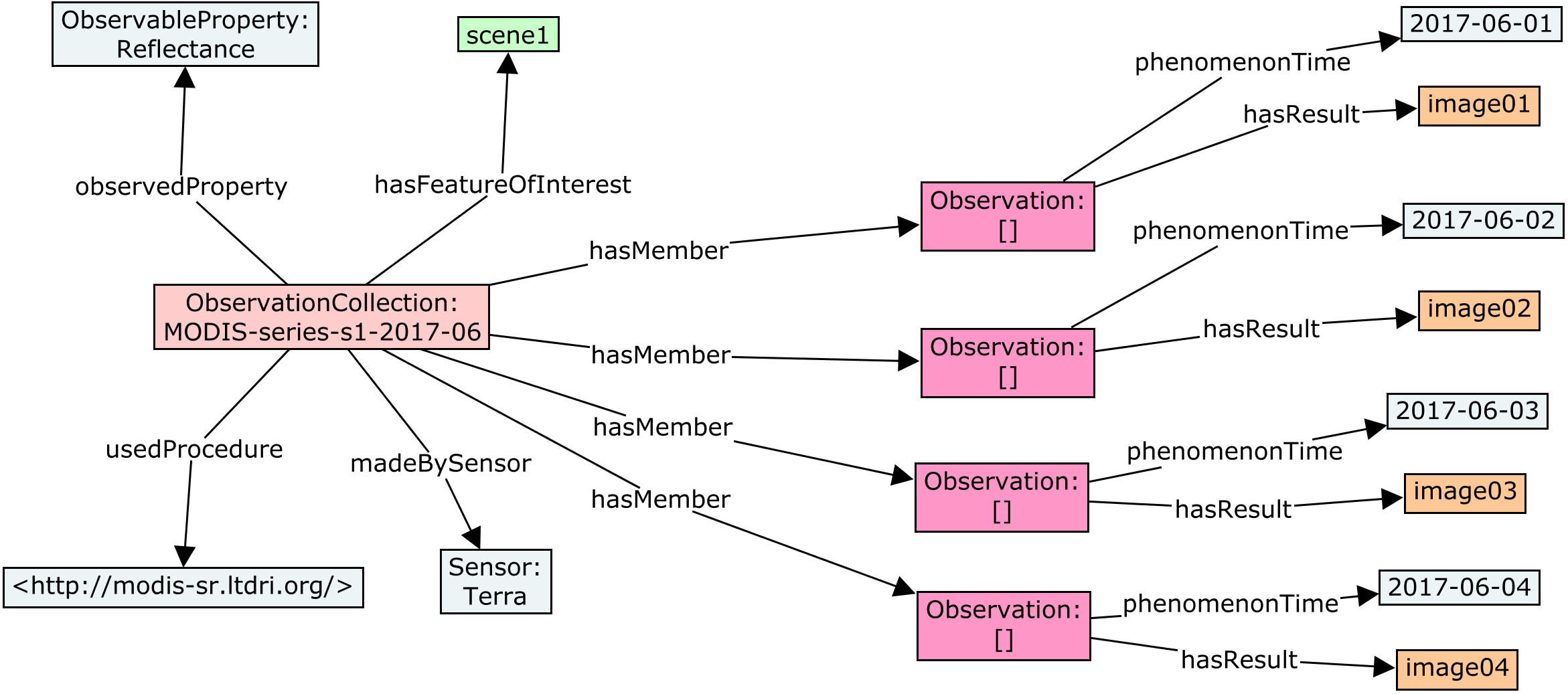
For example, describes a collection of remote sensing observations using the same sensor on different scenes, while is a series of the same scene on different days.
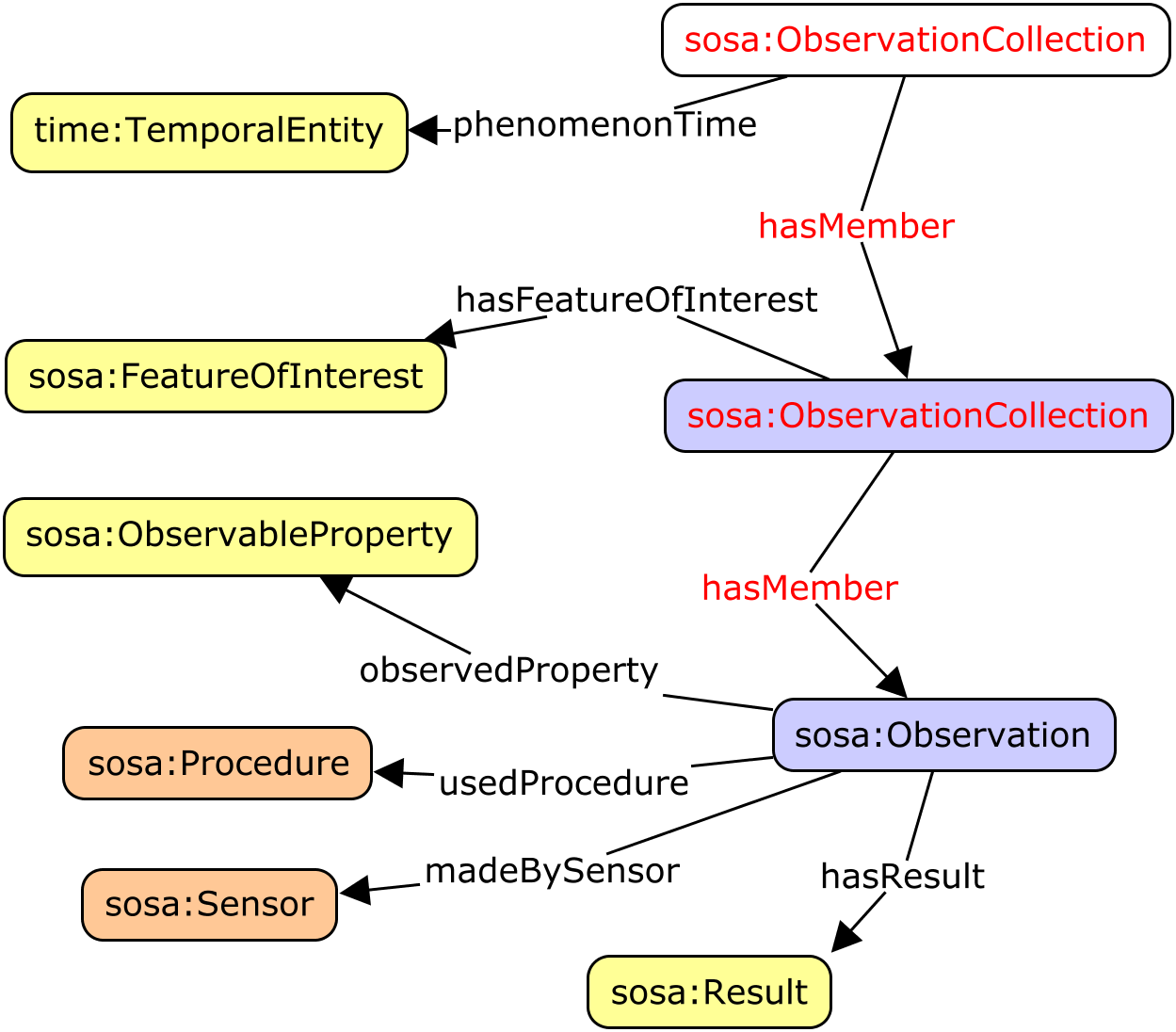
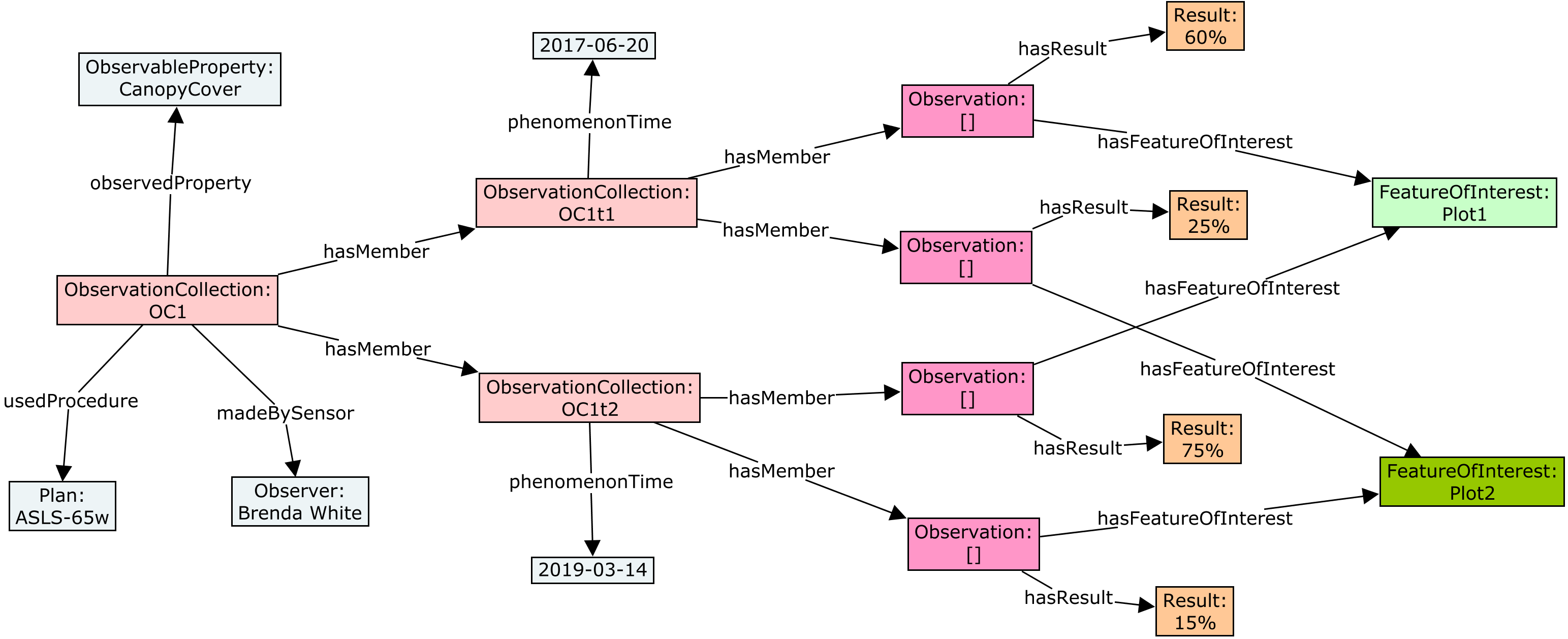
Collections may be nested. For example, an outer observation-collection might share the observed-property, procedure and sensor, and contain inner observation-collections at different phenomenon-times, each of which contain a set of observations on different features-of-interest ().
Observations can be factored into collections in more than one way, so more than one set of nested observation-collections can collect the same set of atomic results. For example, the same outer collection may contain inner collections concerning different features-of-interests, each containing a set of observations at different phenomenon-times ().
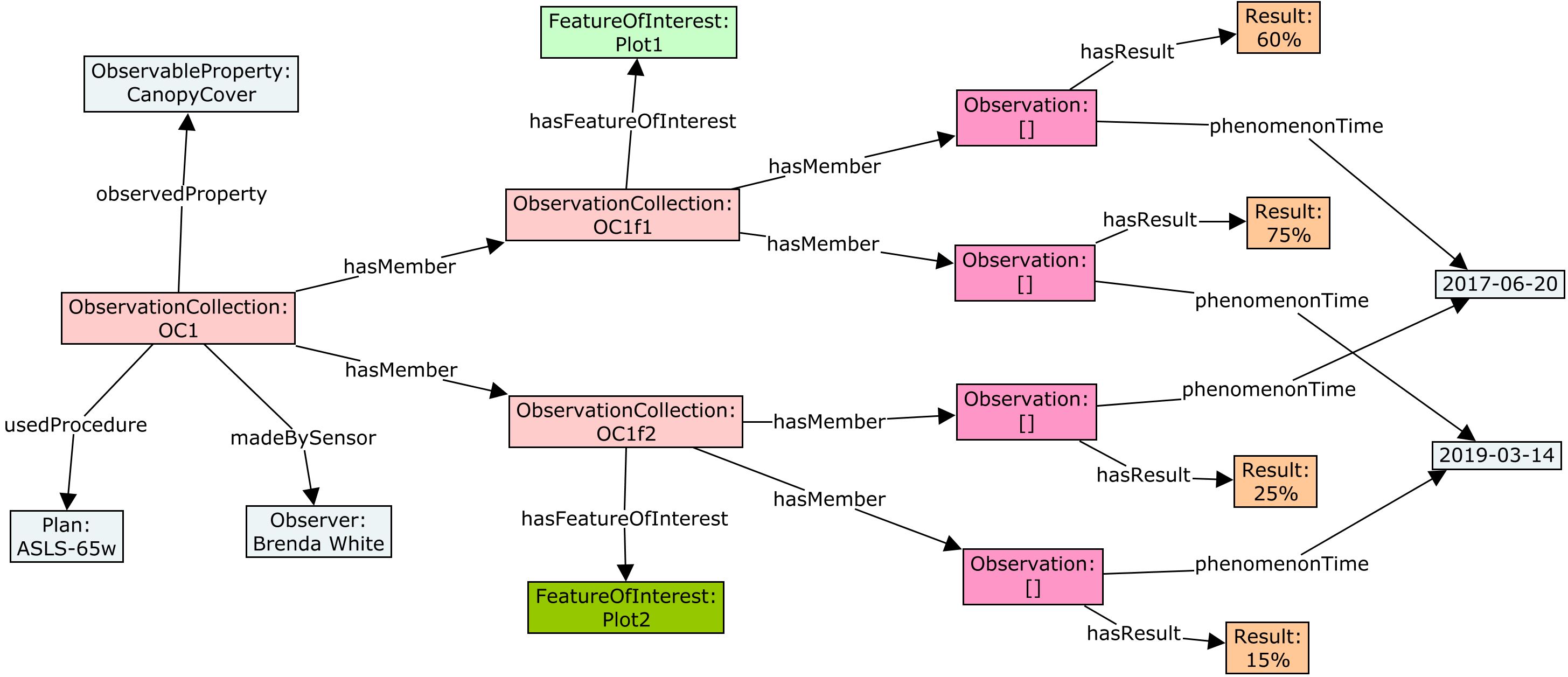
Effectively, the results of each observation-collection correspond to a slice in a data-cube which is composed of the results of the complete set of observations.
This requirement was addressed in OM-Lite [[?OM-Lite]] following the pattern described here.
This feature might also apply to collections of Actuations but this application has not yet been explored.